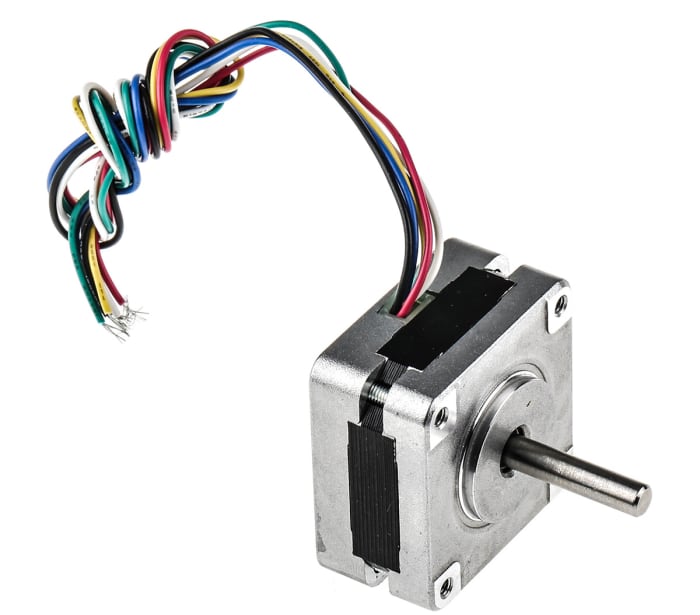
Moteur pas-à-pas Unipolaire Hybride, 50mNm 1.8°, 6 fils, 12 V c.c.

Documents techniques
Spécifications
Détails du produit
Moteur pas à pas, hybride et extra-plat calibre 16
Le moteur pas à pas compact hybride à 4 phases fournit :
Haute résolution de 200 pas/tour (400 pas/tour 1/2 pas)
Corps de 20,5 mm de long pour les installations en espace confiné
Idéal pour les instrument haute résolution
Faible consommation de courant.
0.9° and 1.8° Hybrid Stepper Motors
1.8° Step Angle,The motors are directly compatible with the stepper motor drive boards and also drive either motor (if required) in the half step mode i.e. 0.9° per step resulting in higher resolution, greater performance stability and faster stepping rates. Direction, velocity, acceleration/deceleration can be controlled by a stepper motor controller.,Applying the correct electrical pulse sequence to the windings of the stepper motor results in a 1.8° step angle rotation of the spindle (i.e. 200 steps per revolution). When correctly loaded and driven these motors will produce discrete output steps. The number of steps and speed of rotation are determined by the number of pulses and frequency of the input signal. This provides an ideal method for speed and position control. The motors are directly compatible with stepper motor drive boards.,Applications include:
Prix sur demande
1
Prix sur demande
1
Les informations sur le stock sont temporairement indisponibles.
Veuillez vérifier à nouveau plus tard.
Documents techniques
Spécifications
Détails du produit
Moteur pas à pas, hybride et extra-plat calibre 16
Le moteur pas à pas compact hybride à 4 phases fournit :
Haute résolution de 200 pas/tour (400 pas/tour 1/2 pas)
Corps de 20,5 mm de long pour les installations en espace confiné
Idéal pour les instrument haute résolution
Faible consommation de courant.
0.9° and 1.8° Hybrid Stepper Motors
1.8° Step Angle,The motors are directly compatible with the stepper motor drive boards and also drive either motor (if required) in the half step mode i.e. 0.9° per step resulting in higher resolution, greater performance stability and faster stepping rates. Direction, velocity, acceleration/deceleration can be controlled by a stepper motor controller.,Applying the correct electrical pulse sequence to the windings of the stepper motor results in a 1.8° step angle rotation of the spindle (i.e. 200 steps per revolution). When correctly loaded and driven these motors will produce discrete output steps. The number of steps and speed of rotation are determined by the number of pulses and frequency of the input signal. This provides an ideal method for speed and position control. The motors are directly compatible with stepper motor drive boards.,Applications include: